Velocity is a vector quantity. Its magnitude is called speed and also it has a direction. A body of mass m is moving in a circular path of radius r. There are two possibilities:
First possibility
If the speed is constant, the motion is called uniform circular motion. Speed is constant but the direction is changing continuously, so the motion is accelerated. And the acceleration is along the radius towards the center.
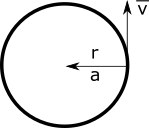
This acceleration is called centripetal acceleration or even radial acceleration and is given by the relation:
a = v2 / r
Where v is the speed. The direction of velocity is along the tangent to the circular path. Thus it changes as the body is at different positions at different times.
Centripetal force = Mass x Centripetal Acceleration
![]()
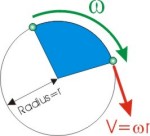
The relation between linear velocity v and angular velocity ω is v = ωr where ω = 2πf
f is the frequency of revolution (units rev/s) ω has the units rad/s
Since cetripetal force is always perpendicular to the velocity, it can not change the magnitude of velocity (speed) or it can not change its speed. It can only change its direction, thus making it move in circular path with constant speed.
Other relations for F:
Since v = ωr

Also 
Second possibility
To change the speed of the body in circular motion, a tangential force has to be applied. If it acts along the direction of velocity, it will increase its speed, On the other hand if it acts opposite to the direction of velocity it will slow it down. Now the motion is called non-uniform circular motion
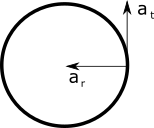
Net acceleration 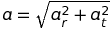
In non-uniform circular motion, speed as well as direction changes continuously.
Center of mass
Consider that there are a number of particles forming a system, such that, when an external force is applied, the complete system moves as on. Now, if we are able to replace all these particles by just one particle. And, this new particle is placed in such a manner and has such a mass, that when acted on by an external force, it moves exactly in the same manner as the system it replaced. Then, we have found the center of mass of the system. (This sounds more complex than it is. So don’t worry! read on)
Center of mass of a two particle system
Let us now consider two particles. Let them have masses m1 and m2. Let r1(t) and r2(t) be the position vectors of the two particles at the instant of time t. (Note: On a web page it is difficult to use the usual vector notation. So I will use bold fonts to depict vectors). The position vector Rc.m.(t), giving the center of mass of this system is given by the formula.
Rc.m.(t) = {m1r1(t) + m2r2(t)} / (m1 + m2)
from the above it is obvious that for a two particle system the center of mass always lies between the two particles. It also lies on the line joining the two particles.
Center of mass of a large number of particles
Rc.m.(t) = {m1r1(t) + m2r2(t) + —– mn rn(t)} / (m1 + m2 + —— mn)
Center of mass of a rigid body
The position of the center of mass of a rigid body is a fixed point. This point may or may not lie in the body. Where is lies depends upon the shape of the body. For example of we take the case of a ring. The center of mass will lie at its geometrical center. Obviously this point does not lie in the ring.
Center of mass of some rigid bodies
| Body | Center of mass  |
|
Rod |
Mid point of rod |
 |
Ring |
Center of ring |
 |
Sphere |
Center of sphere |
 |
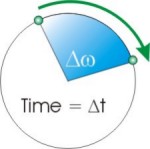
Angular velocity
Average angular velocity = Angular displacement / time interval
So if ω is the average angular velocity, θ the angular displacement and t the time interval. We can say

![]()
So we can write the instantaneous angular velocity as dθ /dt
Linear velocity
Linear velocity = Radius of the circular path x Angular velocity
![]()
Angular acceleration
Average angular acceleration = Change in angular acceleration / Time interval
![]()
Instantaneous angular acceleration
![]()
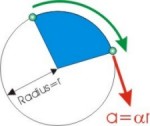
Linear acceleration
Linear acceleration = Radius of the circular path x Angular acceleration
![]()